
For one, building a Mecanum drivebase is an excellent addition to STEM education. It offers an opportunity for students to learn a variety of STEM concepts. Compared to an Omni wheel chassis building a Mecanum drive train requires a lot of programming. Mecanum wheels must be properly oriented. The angle of the rollers is an integral part of the code for the mecanum drivetrain, while this is not the case for an Omni-wheel drivetrain. This requires a decent level of mathematics such as calculus and trigonometry making it fit perfectly with STEM education goals.
For example, the calculus of the programming algorithm helps students understand how the angle of each roller affects the direction the robot travels. A variety of mechanical and software concepts and skills can be learned in a project like this. Since the wheels must be individually powered and programmed, the overall design of the robot must be perfectly balanced if you want your robot to drive properly. But logistically, what are the benefits as compared to a drivebase with Omni wheels? Let’s take a closer look.
For the context of this article, we are speaking in the context of a simple square drivebase. Given that, let’s consider the scenarios where it would be best for your robot to use a drivetrain with Mecanum wheels instead of Omni wheels.
#1 – Traction: Both options will offer solid traction.
#2 – Dynamic Movement: Omni wheels enhance rotation making it easier to turn left or right more efficiently. Mecanum wheels offer enhanced mobility in all directions which is particularly useful for achieving side-to-side strafing movement. (Yes, Omni wheels could be used to create strafing movements, but not in the context of a simple square drivebase. This would require X-Drive and Holonomic drive base builds.)
# 3 – The Robot Competition Game: Your decision will be based on what challenges your robot will need to overcome during the competition.
#4 – Number of Wheels: Mecanum wheels require a motor for each wheel. Therefore, they can only be used for a 4-wheel drive base. If your answer is 2 or 3 wheels, you will need to use Omni wheels.
#5 – Number of Motors: Again, the Mecanum wheels require one motor per wheel. With Omni wheels, you could use two motors to power a 4-wheel drive robot.
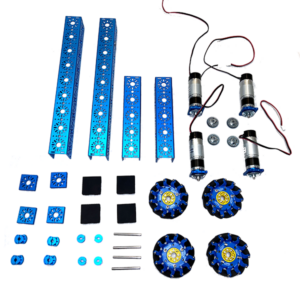
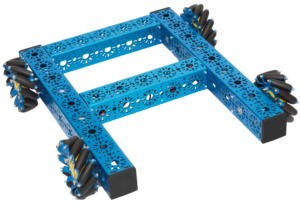
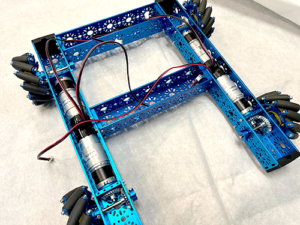
The FTC Drive Base Kit – v2 from Studica Robotics is the perfect solution for your next drivetrain. This complete robot drive base kit provides all the materials needed to create a robust Mecanum chassis including 4 – NeveRest Orbital 20 Gearmotors with encoder cables, new clamping shaft hubs, 4 bumpers, and complete hardware. View the complete list of components. Studica Robotics also provides STEP 3D files for each part allowing you to easily design your robot in Solidworks, Inventor, Fusion 360, or Creo. The Mecanum wheels and NeveRest Orbital 20:1 gear motors create a very maneuverable and swift chassis.
Studica Robotics is a comprehensive robotics building platform that provides everything you need to build, learn, and compete. We offer various robot parts, robotics kits, and cutting-edge electronics. This powerful robotics platform is ideal for the classroom, robotics teams, homeschoolers, hobbyists, enthusiasts, and anyone who wants to make their build ideas come to life. Our comprehensive robotics kit for building a Mecanum chassis is an excellent solution for your next drive train. Let’s review the benefits of the FTC Drive Base Kit – v2.
Advantages of the FTC Drive Base Kit – v2:
With a reputation for technical expertise, Studica Robotics is an innovator committed to supporting the needs of the education and robotics competition communities. Our durable, affordable structure components are easy to assemble and connect to our wide range of motion components. Our electronics, from controllers to sensors, empower your robot with cutting-edge capabilities. Our VMX Robotics Controller is versatile and programmable in multiple languages, making it ideal for complex projects and autonomous robots. Discover your true building potential with Studica Robotics!


